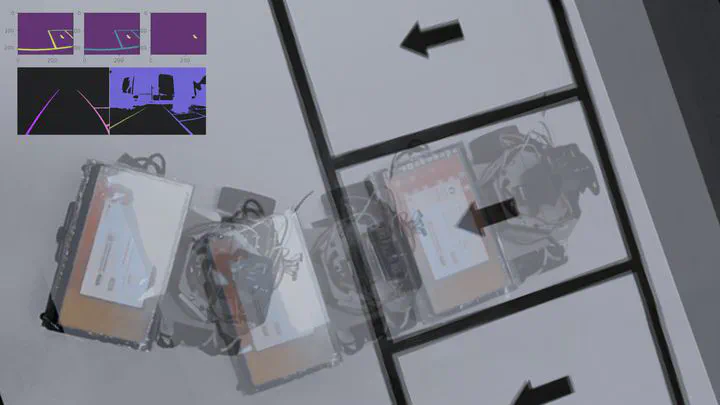
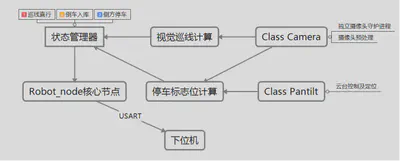
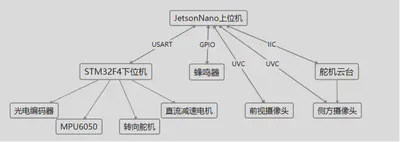
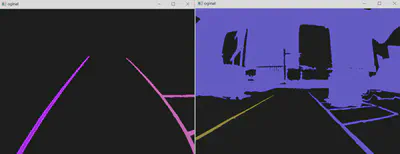
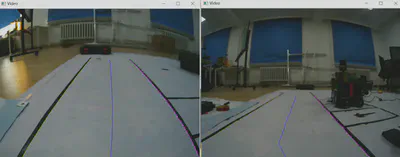
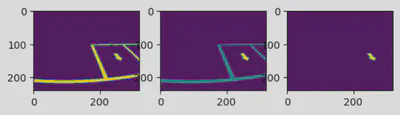
Ackermann Auto ParkingOct 23, 2022 · 1 min readFull marks work for the Auto Parking challenge in 2022 TI Cup National Undergraduate Electronics Design Contest.Software FrameworkHardwareLane & Parking Lot DetectionLast updated on Oct 23, 2022Robotics Auto Driving AuthorsLei YeMaster Student ← SpaceSim Scene Editor Dec 22, 2022Automated Excavator Sep 26, 2022 →