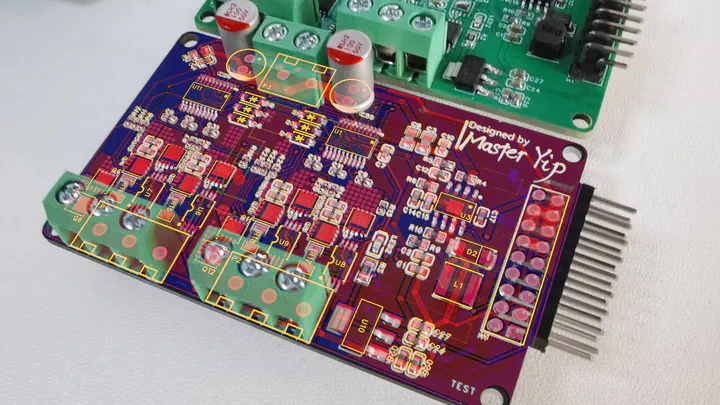
FOC DriverApr 1, 2023 · 1 min readFOC Driver for BLDC motor control based on ESP32. Applied on Lelo Self-Balancing Triangle.FOC Driver DesignSchematic Diagram PCB DesignPCB HardwareLelo Self-Balancing Triangle Last updated on Apr 1, 2023Robotics FOC Control LQR AuthorsLei YeMaster Student ← NotingDown May 7, 2023Invoice Manager Mar 10, 2023 →