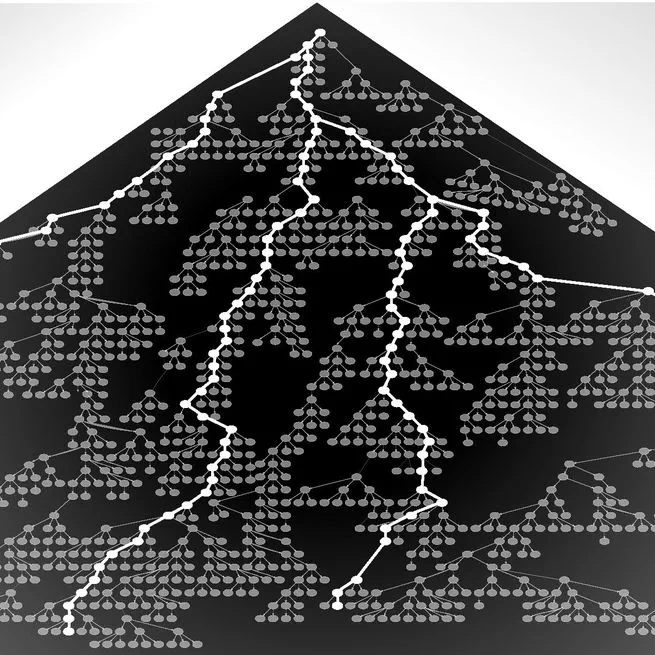
Contact Planning for Multi-Legged Robots under Constraints through Parallel MCTS
A novel contact planning approach for multi-legged robots under comprehensive constraints based on parallel MCTS.
Apr 7, 2025
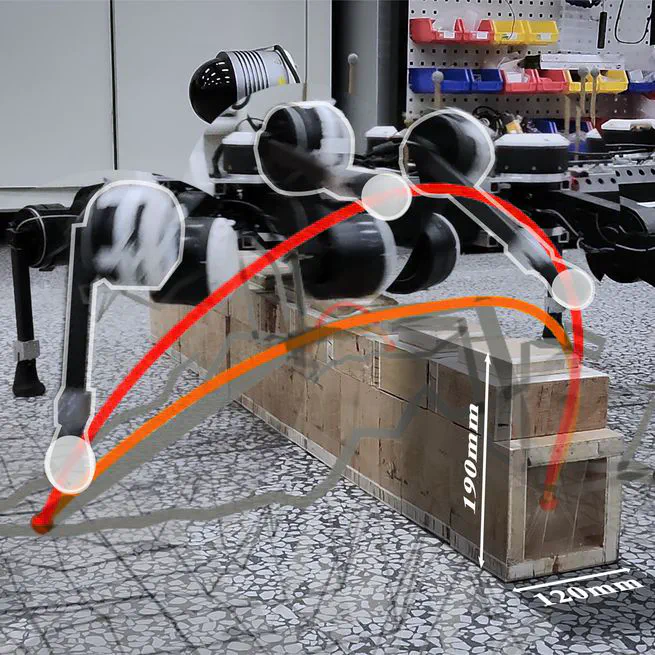
KCFRC: Kinematic Collision-Aware Foothold Reachability Criteria for Legged Locomotion
A novel approach for real-time foothold reachability analysis for legged robots.
Oct 26, 2024